项目介绍
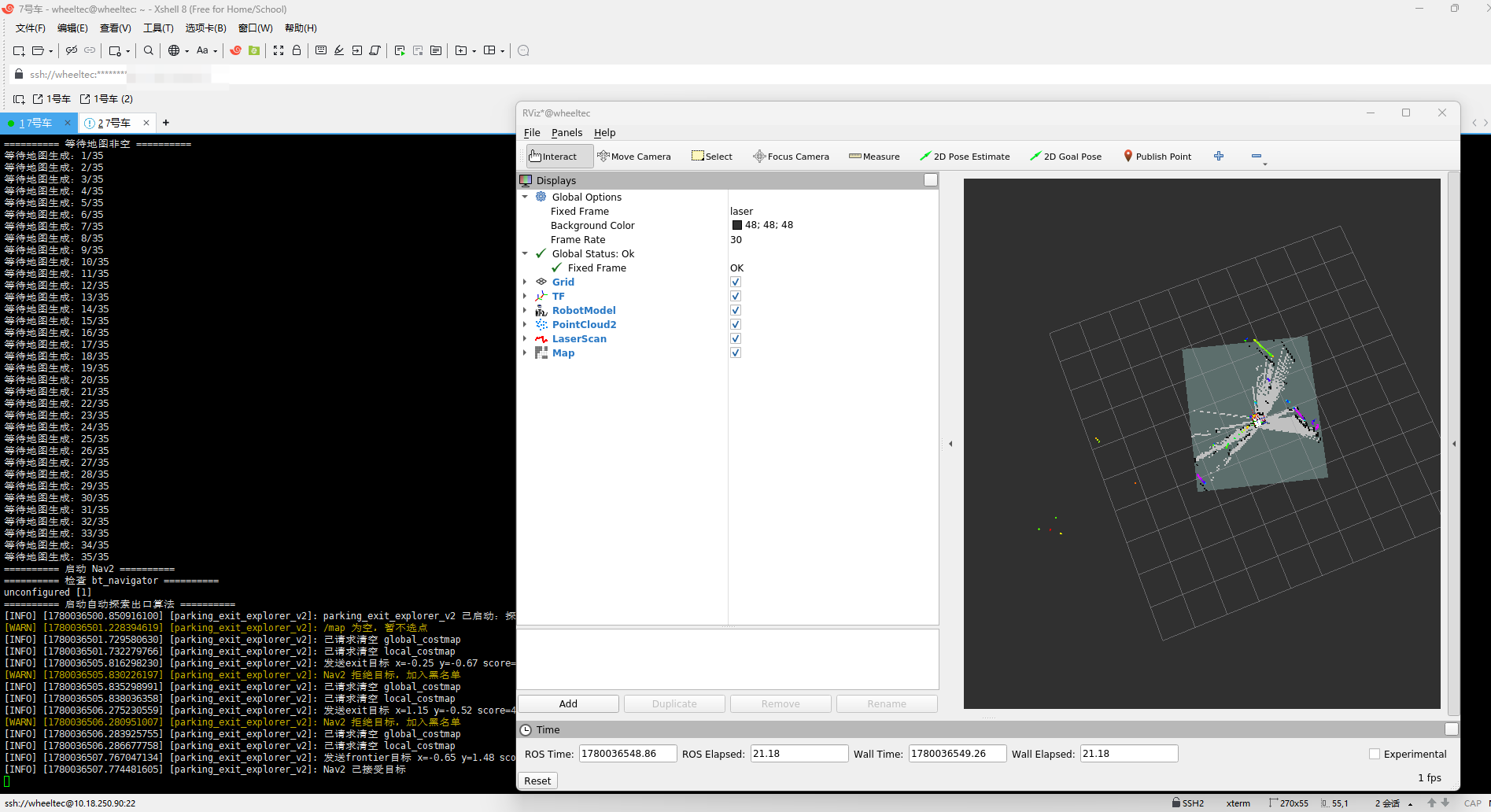
一款基于ros2轮趣小车开发的slam实时建图代码环境,实现一键部署环境并启动自主导航功能。
使用方式:
1.将文件上传至小车
2.运行下方命令
mkdir -p ~/deploy_parking_exit
unzip ~/wheeltec_parking_exit_runtime_*.zip -d ~/deploy_parking_exit
cd ~/deploy_parking_exit/wheeltec_parking_exit_runtime_*
bash install_on_new_robot.sh
3.一键启动
bash ~/ros2_slam_nav2/start_parking_exit_system.sh
4.检查状态
bash ~/ros2_slam_nav2/check_parking_exit_status.sh
5.停止
bash ~/ros2_slam_nav2/stop_parking_exit_system.sh
留言与评价